ニュース
世界初、動的障害物を回避して自律飛行するドローンの実証実験に成功しました
2023.11.21
お知らせ
【世界初、動的障害物を回避して自律飛行するドローンの実証実験に成功】
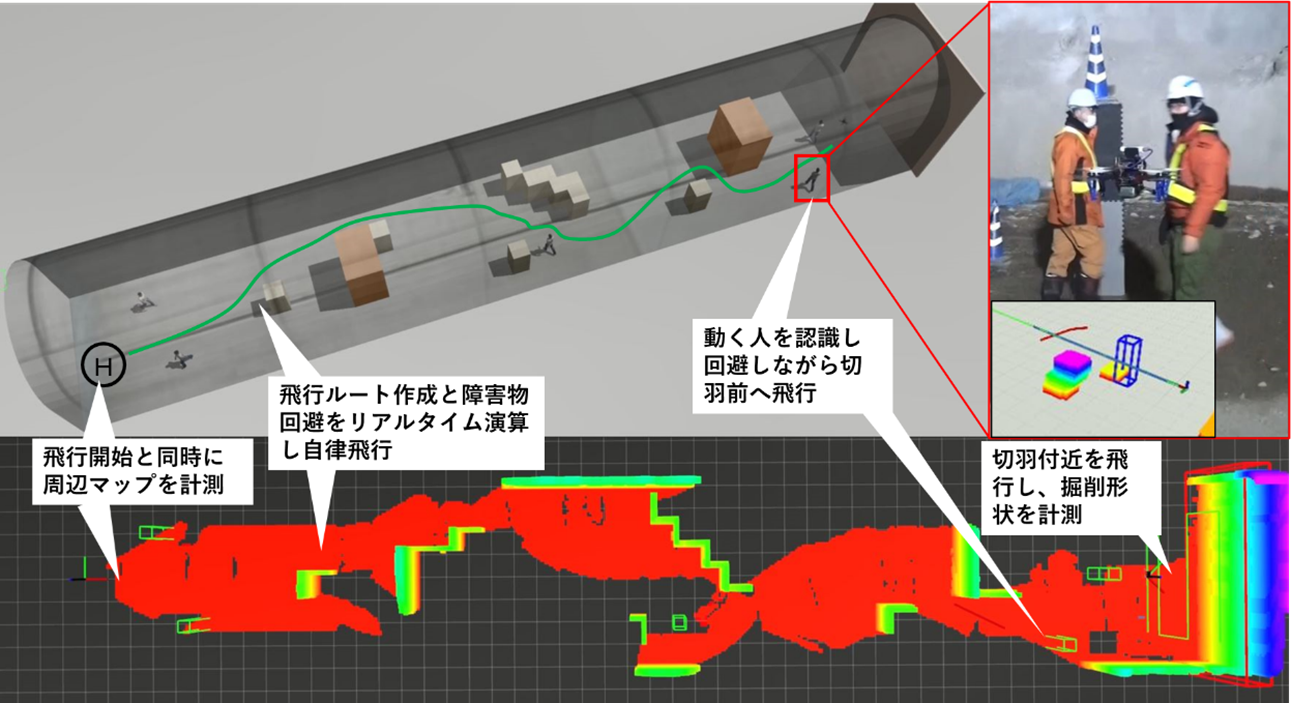
~トンネル坑内で作業中の人や重機を回避しながら、掘削形状を計測~
この度、当社は株式会社大林組と共同でトンネル坑内の非GNSS環境下において、作業中の人や重機といった動的障害物を回避しながら自律飛行するドローンを開発し、世界で初めて※1実証試験に成功しました。
※1㈱大林組調べ(2023年10月)。
「トンネル坑内で動的障害物を回避し、自律飛行するドローン」として世界初
この開発はカーネギーメロン大学機械工学科の嶋田憲司教授が主宰する、計算工学・ロボティクス研究室(CERLAB: Computational Engineering and Robotics Lab)の協力を得たものです。
当技術はトンネル掘削工事において、切羽付近は崩落のリスクがあるため、作業員が危険区域に立ち入ることなく
確認できるよう、ドローンを使った計測技術です。
ドローンにはセンサーを搭載しており、独自に開発したアルゴリズムにより動的障害物を回避した飛行ルートを自動生成
することができます。
詳細は下記リンク先をご参照下さい。
https://www.obayashi.co.jp/news/detail/news20231113_1.html
大林組 2023年11月13日プレスリリース
ニュース一覧へ